Blog
Learning action-angle coordinates with a Koopman-inspired symplectic autoencoder
I have been working on a neural-network approach to learning action-angle coordinates directly from orbital trajectories, while also recovering orbital frequencies and a Hamiltonian-like energy map. The longer-term goal is to make action-angle calculations more flexible in realistic Galactic potentials, but for now I only want to show the one-dimensional validation tests publicly.
So this post is intentionally narrow: a brief bit of context, the core idea, and the 1D results in the harmonic oscillator and isothermal slab. The broader axisymmetric results are being held back for now because that work is intended for publication.
Why action-angle coordinates matter
Action-angle coordinates are one of the most natural languages for regular Hamiltonian motion. In integrable systems, the actions are constants of motion, while the angles evolve linearly in time. That makes them extremely useful both for equilibrium modelling and for studying disequilibrium structure in the Milky Way.
In Galactic dynamics, these coordinates are especially valuable because distribution functions are often written in terms of the actions, and because action-angle structure can reveal moving groups, resonances, phase mixing, spiral features, and bar-driven dynamics much more cleanly than ordinary phase-space coordinates alone. The difficulty is that action-angle coordinates are only known analytically in a few ideal potentials.
This project asks whether a useful action-angle representation can be learned directly from trajectories while still respecting Hamiltonian structure.
The idea in one paragraph
The model is a symplectic autoencoder. It learns an invertible map from phase-space coordinates into a latent space where each degree of freedom is represented by a two-dimensional plane. In that latent space, the dynamics are constrained to look like simple rotations, so the radius of each latent pair behaves like an action and the phase behaves like an angle.
A separate small neural network then learns the frequency map and another learns a scalar energy-like function, with the model encouraged to satisfy the Hamiltonian relation dH/dJ ~ Omega(J). The point is not just to reconstruct trajectories, but to make the latent variables physically interpretable.
A short mathematical sketch
The autoencoder learns an encoder Psi and decoder Phi so that phase-space evolution is approximately conjugate to a simpler latent evolution,
Each latent pair is interpreted as a complex coordinate whose radius encodes an action and whose phase encodes an angle,
The latent step is then just a rotation,
That rotation preserves radius exactly. So the latent action is conserved by construction, while the frequency map is learned from data.
Model construction
I am skipping most of the training details here, but the architecture matters. The encoder is built from symplectic coupling layers, so the learned map is invertible and structure-preserving by construction. The decoder is simply the inverse map. That helps separate two different questions: whether the representation itself is good, and whether the learned latent evolution is good.
In one dimension, the model is relatively small: an 8-layer symplectic encoder/decoder, plus compact MLPs for the frequency map and the Hamiltonian regressor. The two validation problems are a harmonic oscillator, where the action-angle structure is analytically known, and an isothermal slab, where the frequency varies non-trivially with action.
1D tests
The first set of checks is deliberately simple. If the model cannot recover stable actions, angles, and frequencies in one dimension, there is no point pretending it will behave sensibly in more realistic Galactic potentials.
Harmonic oscillator
Potential: Phi(z) = omega_0^2 z^2 / 2 with omega_0 = 0.5. Here the true frequency is constant, so this is the cleanest sanity check.
Isothermal slab
Potential: Phi(z) = 2 sigma^2 log(cosh(z / 2 z_0)) with sigma = 1 and z_0 = 1. This is more interesting because the oscillation frequency decreases with action.
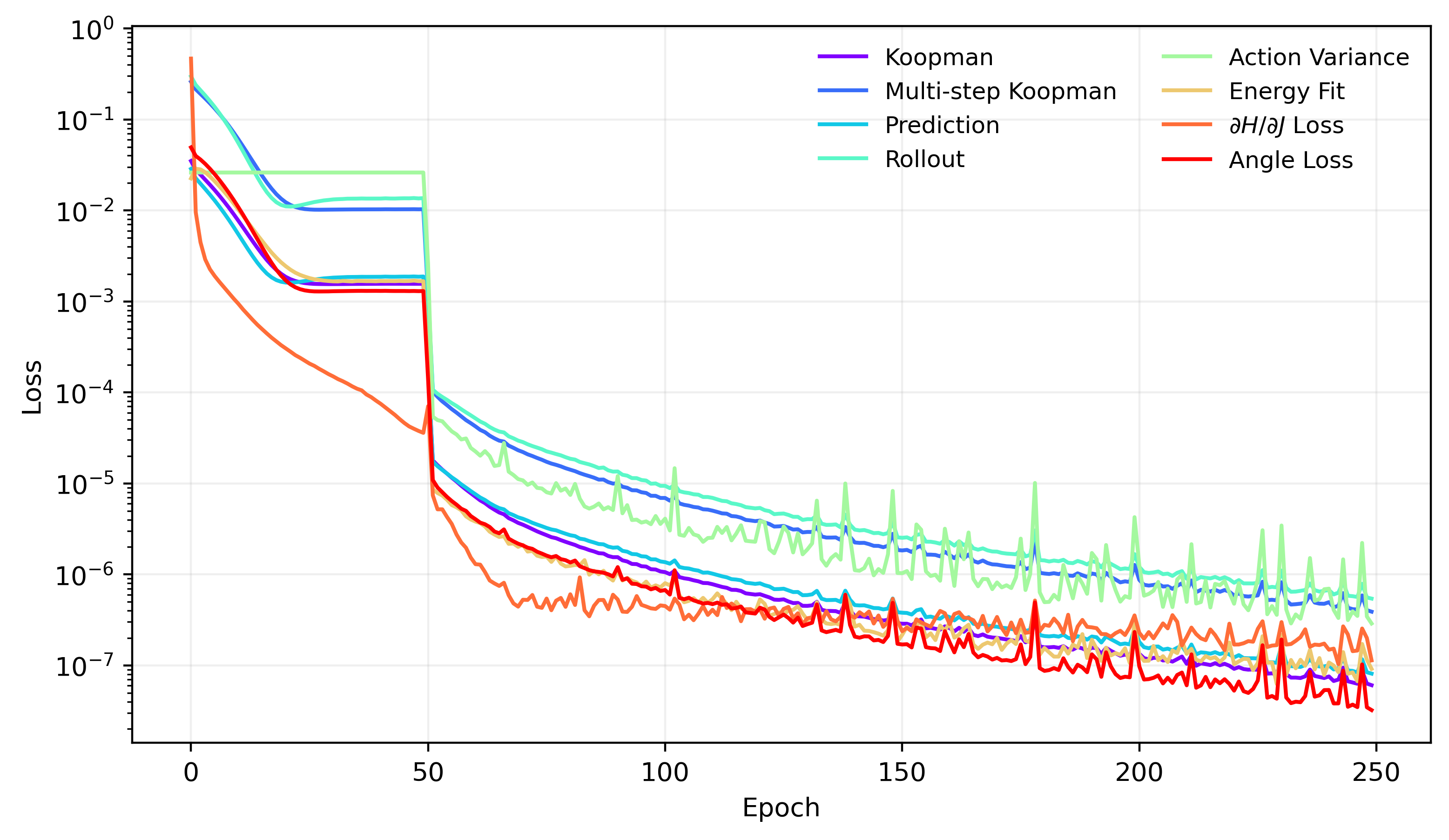
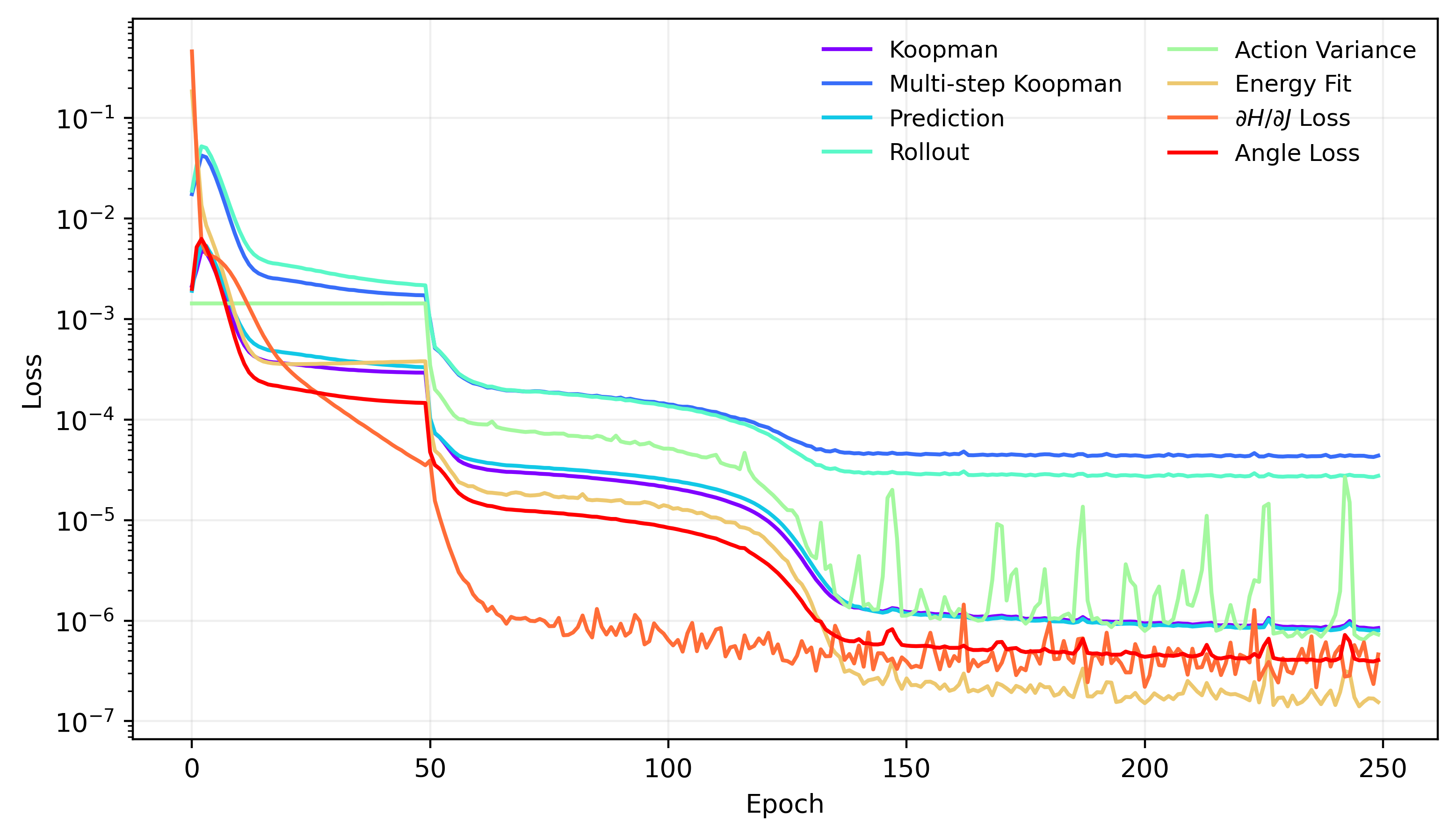
Training curves
Both 1D experiments train cleanly. I am not showing every individual loss term here, but the main point is that the one-step, rollout, and physics-informed objectives settle to small values by the end of training in both systems.
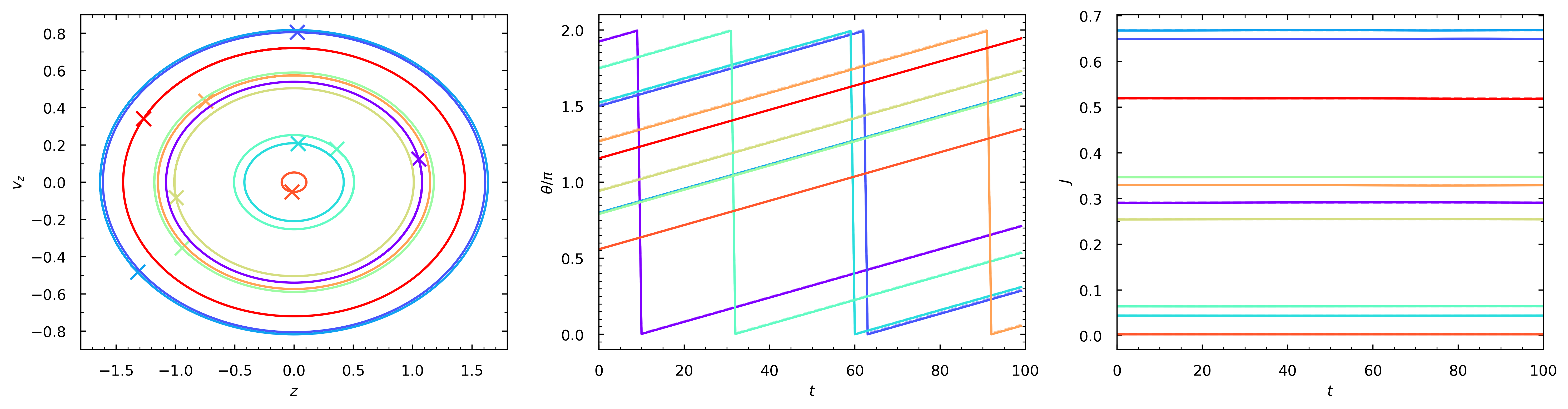
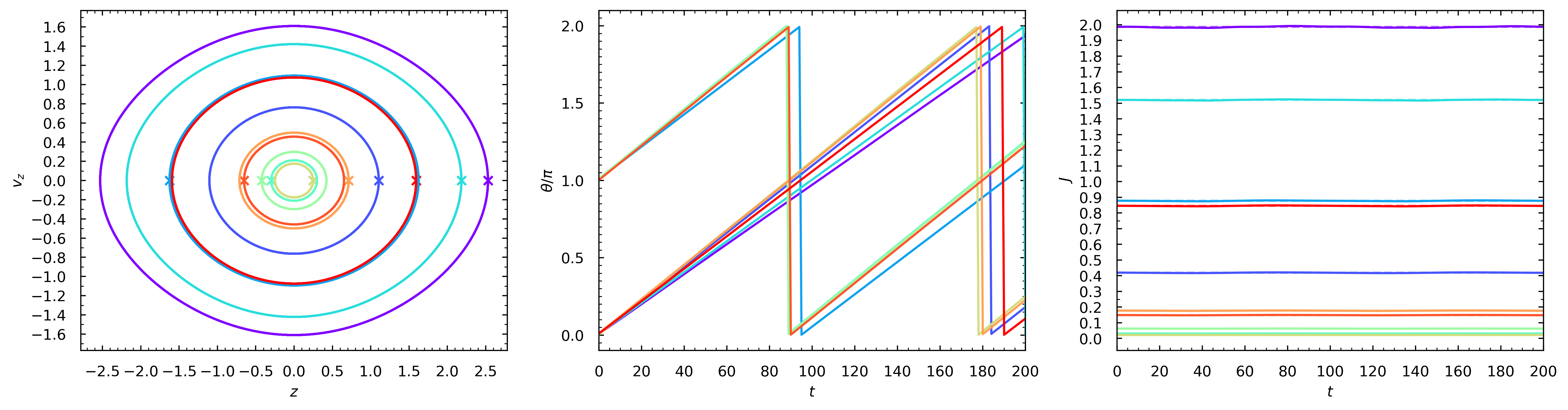
Recovered actions and angles
The most important qualitative check is whether the learned action stays nearly constant along each orbit, while the learned angle tracks a linearly advancing variable. That is exactly what the model recovers in both 1D examples.
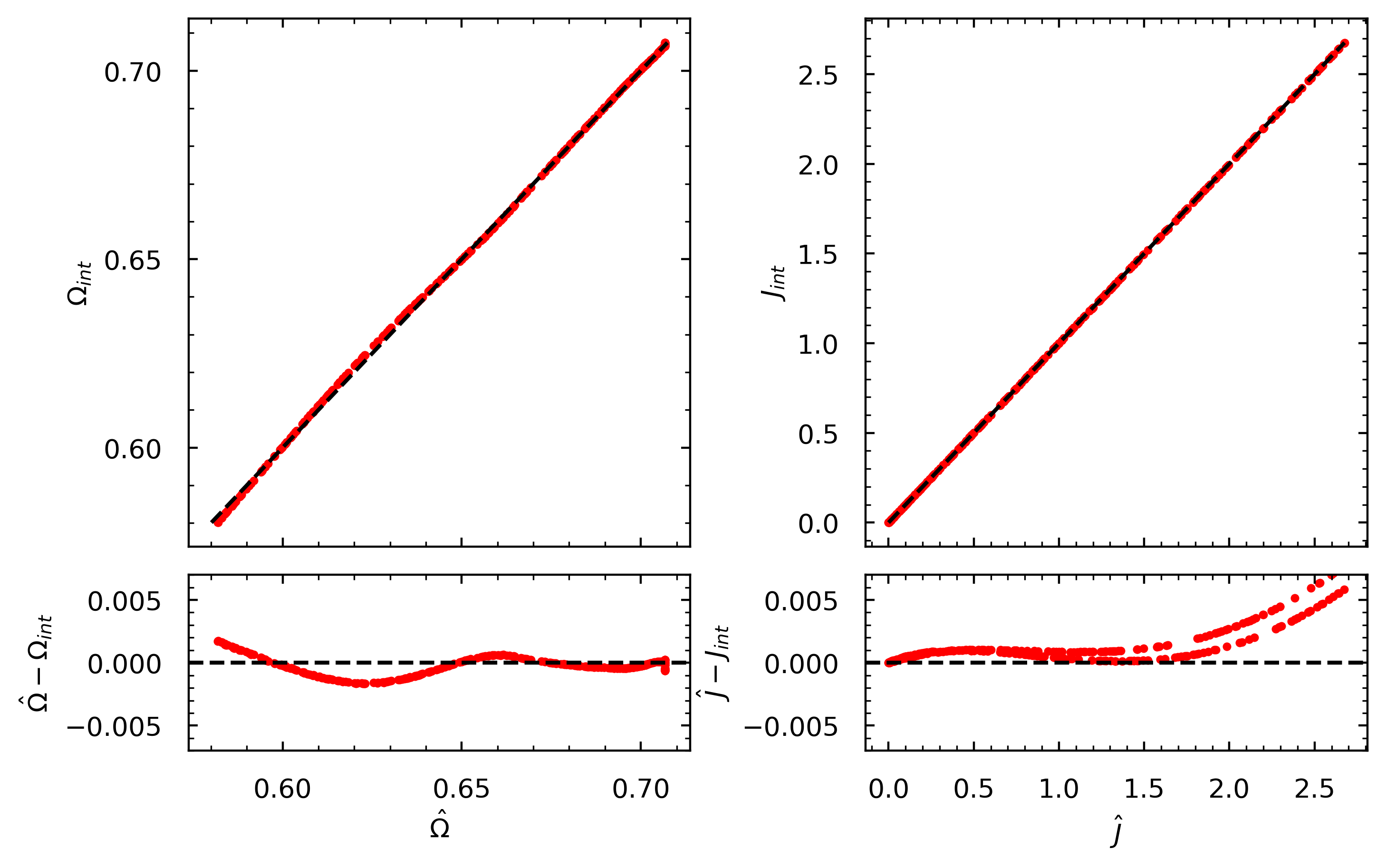
Frequency-action comparison in the isothermal slab
For the isothermal slab, I compared the learned actions and frequencies against numerical reference values obtained from the standard orbit integrals,
The agreement is good: the absolute residuals stay within about 0.005, which is more than enough to show that the model is learning a sensible action-frequency relationship rather than just memorising trajectories.
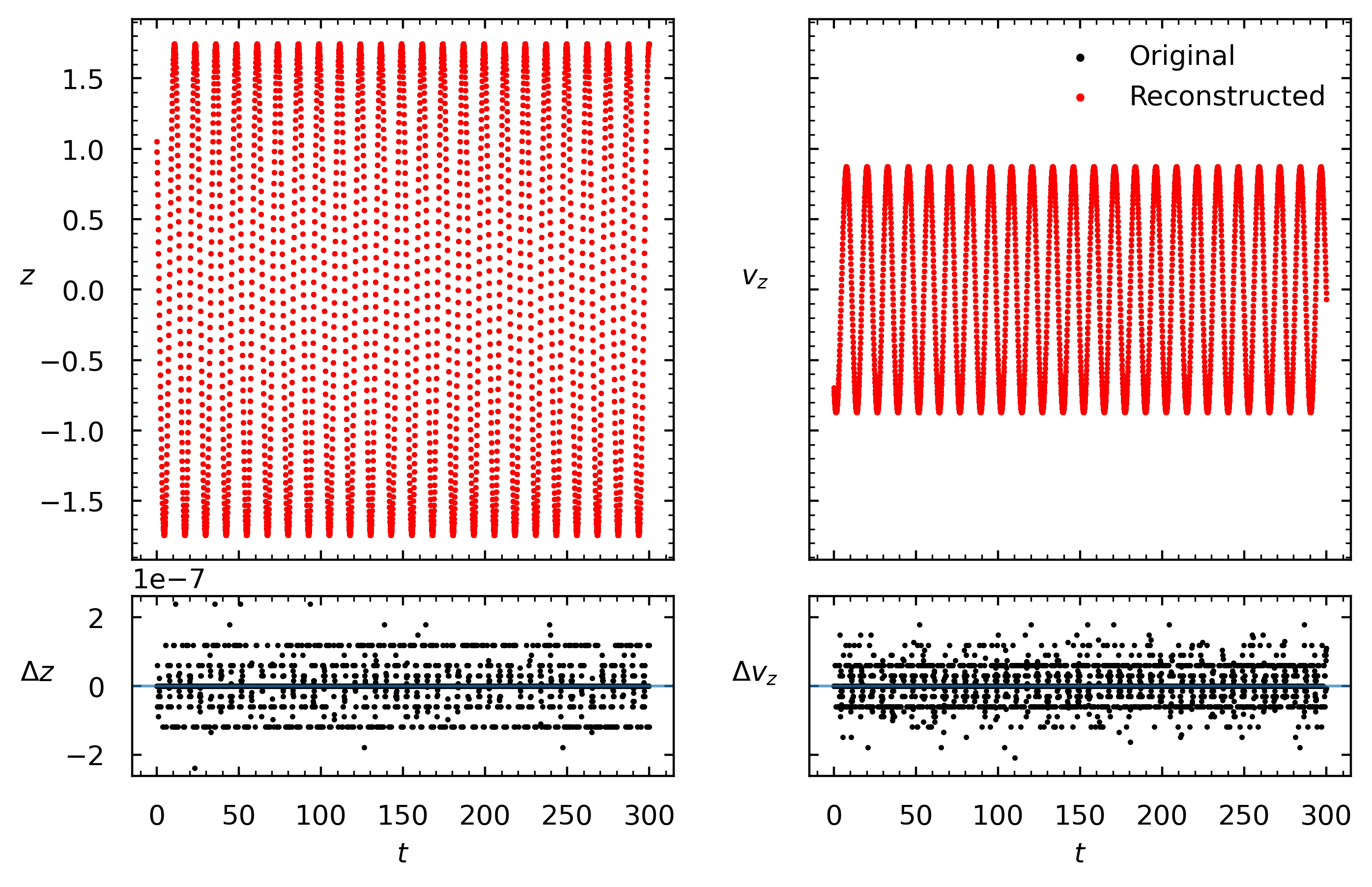
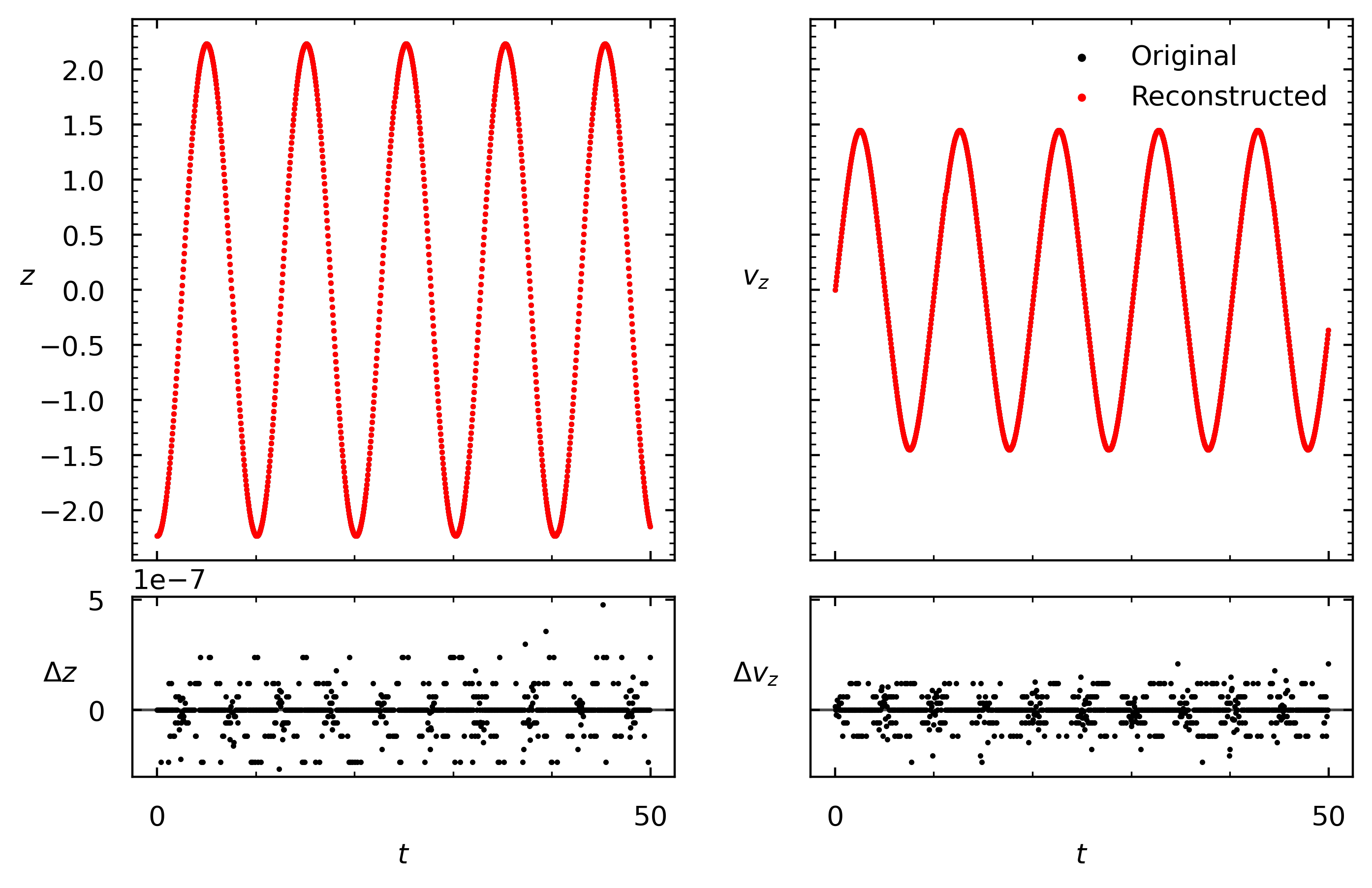
Reconstruction and inverse mapping
Another useful check is to separate reconstruction quality from dynamical prediction. If a state is encoded and immediately decoded, the reconstruction is essentially exact up to numerical precision. That confirms that prediction errors are driven by the learned latent evolution and frequency map, not by a failure of invertibility in the symplectic encoder-decoder pair.
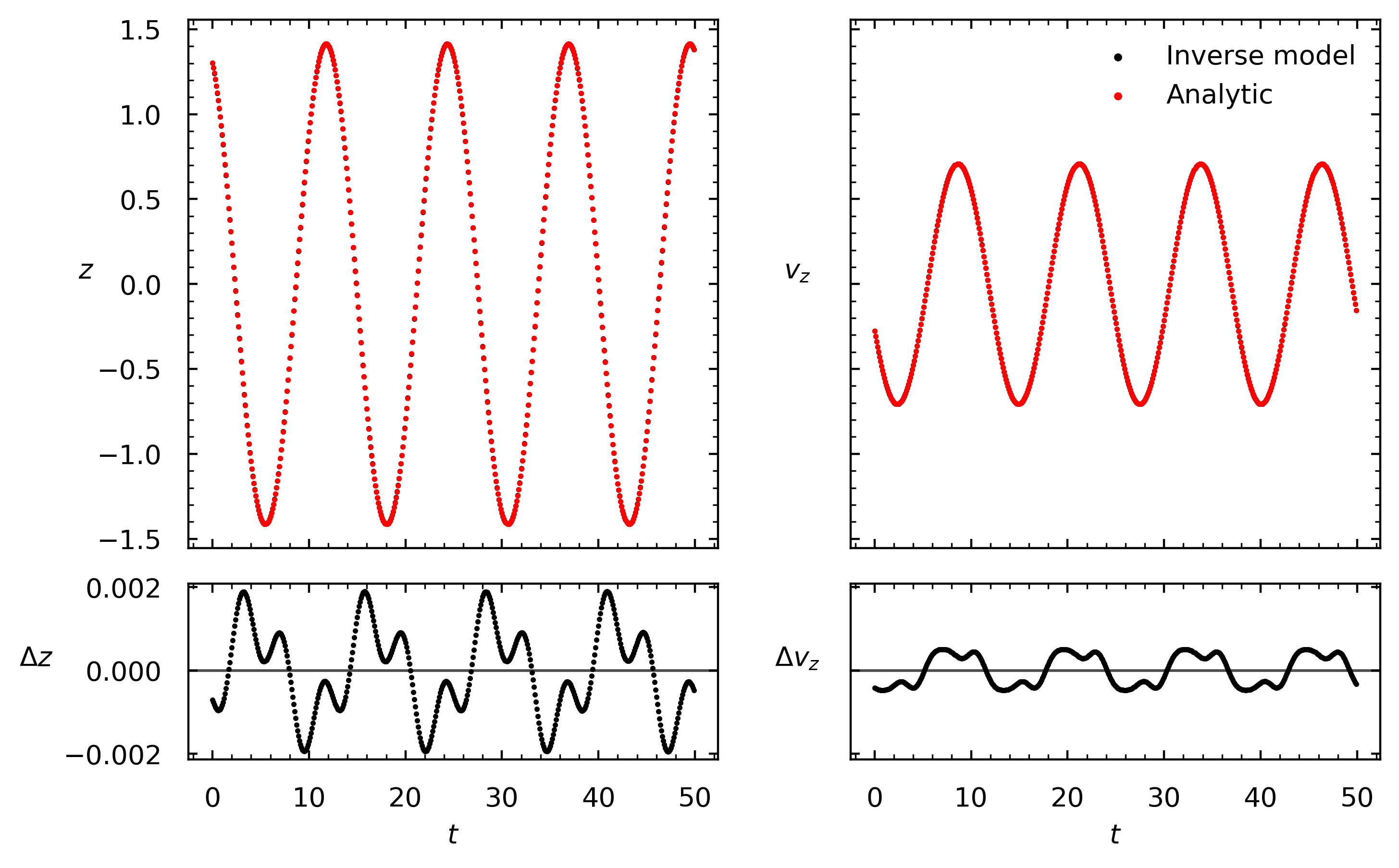
In the harmonic oscillator, the learned inverse map can also be used to generate an orbit directly from an initial action-angle point. The decoded trajectory stays close to the analytic solution, with residuals at the 10^-3 level and no obvious secular drift over multiple periods.
What I think is actually interesting here
There is no shortage of machine-learning models that can fit trajectories. The more interesting question is whether a model can discover coordinates that behave like the right physical variables. These 1D tests suggest that a symplectic autoencoder plus constrained latent rotations is a plausible route to doing exactly that.
The real challenge is of course the higher-dimensional Galactic case, where actions and frequencies are more subtle and the benchmark is much harsher. I am deliberately not showing those results yet, but the 1D experiments are the reason I think the larger programme is worth pursuing.
References
Antoja et al. (2023). Vertical waves, ridges and phase-space spirals in the Milky Way. ADS
Binney (2010). Distribution functions for the Milky Way. ADS
Bramburger (2024). Introduction to Koopman Operator Theory and Its Applications.
Brunton, Budišić, Kaiser, and Kutz (2022). Modern Koopman Theory for Dynamical Systems. arXiv
Greydanus, Dzamba, and Yosinski (2019). Hamiltonian Neural Networks. arXiv
Gaia Collaboration (2023). Gaia Data Release 3. ADS
Hunt et al. (2019). Kinematic substructure in action space with Gaia. ADS
Ibata et al. (2021). ACTIONFINDER: deep learning of canonical transformations. ADS
Jin et al. (2020). SympNets: intrinsic structure-preserving neural networks for Hamiltonian systems. arXiv
Koopman (1931). Hamiltonian systems and transformation in Hilbert space.
Lusch, Kutz, and Brunton (2018). Deep learning for universal linear embeddings of nonlinear dynamics. Nature Communications
Palicio et al. (2023). Tracing spiral arms in action space.
Paszke et al. (2019). PyTorch: An Imperative Style, High-Performance Deep Learning Library. arXiv
Piffl et al. (2014). Constraining the Galaxy's mass distribution with realistic action calculations. ADS
Sanders and Binney (2016). Methods for computing actions, angles and frequencies in Galactic potentials. ADS
Williams, Kevrekidis, and Rowley (2015). A data-driven approximation of the Koopman operator: extending dynamic mode decomposition. Journal of Nonlinear Science